Lo scenario è suggestivo: due astronauti fanno pratica di passeggiata spaziale. Nel silenzio ovattato del loro casco, le uniche variazioni sono rappresentate solo dal suono del loro respiro e dalla voce del Controllo Missione in cuffia.
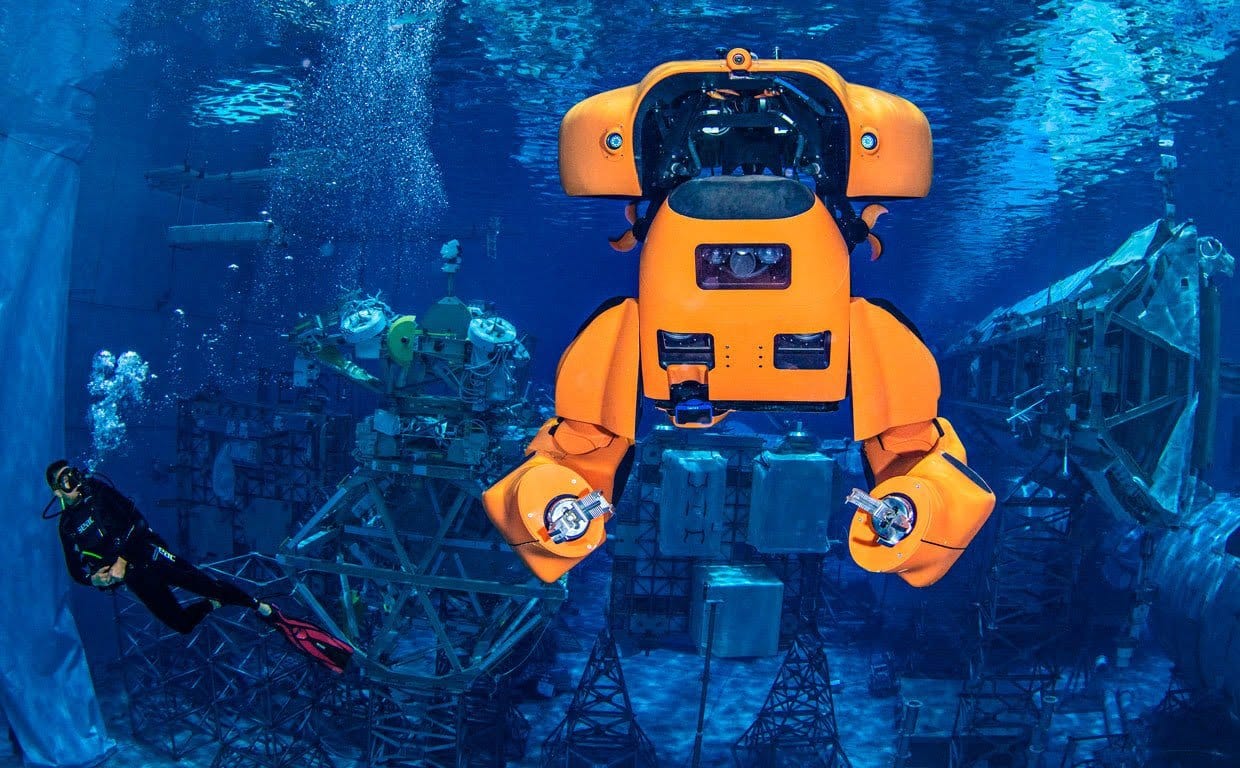
Non siamo nello spazio, purtuttavia. Siamo a Houston, nella enorme piscina che funge da palestra per gli astronauti che si addestrano alle missioni NASA. A pochi metri dagli “astronauti” che in realtà passeggiano sott’acqua, un altro oggetto divide l’abisso con loro: è Aquanaut, un robot transformer subacqueo dalle caratteristiche davvero speciali.
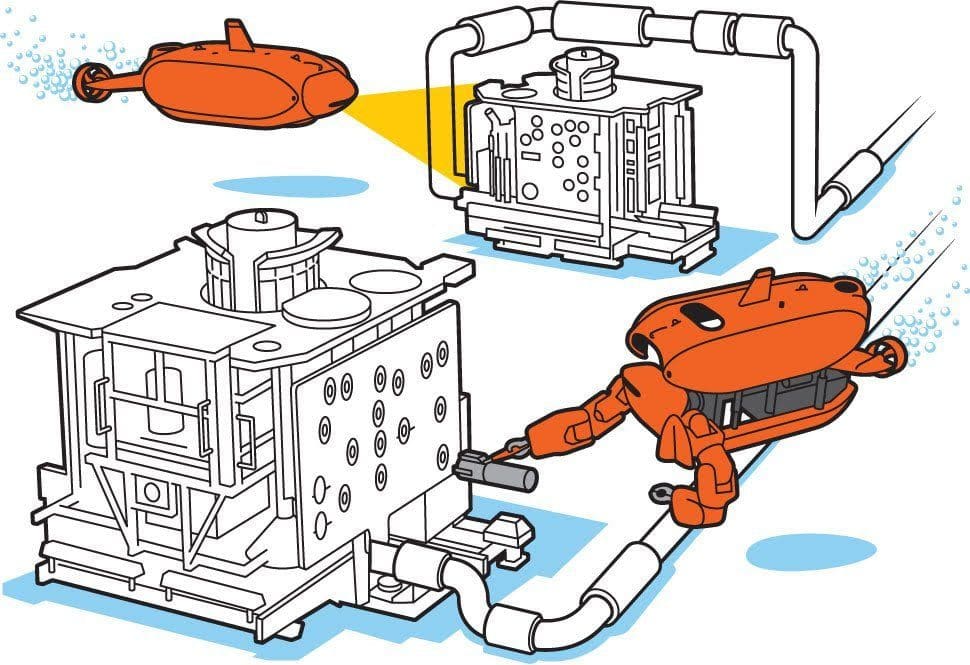
Aquanaut si muove nell’acqua come un vero e proprio sottomarino, ma diversamente dai veicoli teleguidati, o UUV (unmanned underwater vehicles) ha un’abilità in più.
All’occorrenza, in un twist degno delle scene di film come “Transformers”, la parte superiore del robot si solleva in verticale e mostra due grandi braccia che spuntano dai lati. Una testa zeppa di sensori ruota su sé stessa per posizionarsi al centro, e la trasformazione è completa. Saranno gli anni ’70 che mi diedero i natali, o il colore arancione, ma qualcosa in lui riecheggia il Getter Robot, se avete presente ciò di cui parlo.
Insomma, eccovi servito un sottomarino che quando serve si trasforma in un robot transformer subacqueo e semiumanoide.
Aquanaut è una radicale evoluzione degli UUV, sviluppata da una società chiamata Houston Mechatronics Inc. (HMI), che cambierà totalmente la robotica subacquea.
I tradizionali UUVs fanno parte di due categorie: i sommergibili orientati alla navigazione veloce, più allungati, e quelli orientati alla raccolta di campioni, più tozzi e lenti, solitamente uniti alla barca da un cavo. HMI punta a unire le funzioni in un solo robot transformer subacqueo: veloce in navigazione e versatile quando c’è da raccogliere materiali. Nessuno aveva mai tentato un approccio del genere.

Aquanaut è stato concepito per piattaforme petrolifere e installazioni in mare aperto, ambienti complessi che attualmente adoperano tecnologie robotiche uguali da decenni. L’esperienza di HMI potrebbe giocare un ruolo fondamentale: il 75% dei dipendenti lavora anche per la NASA, gli ambienti estremi non sono un problema.
Il co-fondatore di HMI, Nic Radford, ha lavorato per 14 anni a progetti di robotica avanzata al Johnson Space Center di Houston. “E vi garantisco che andare nello spazio è più difficile che andare sott’acqua,” dice con una punta di orgoglio. “Per i robot però il discorso potrebbe invertirsi. Ambienti dinamici come quelli subacquei possono essere dalle 10 alle 50 volte più difficili di quelli spaziali.”
Trasformazione
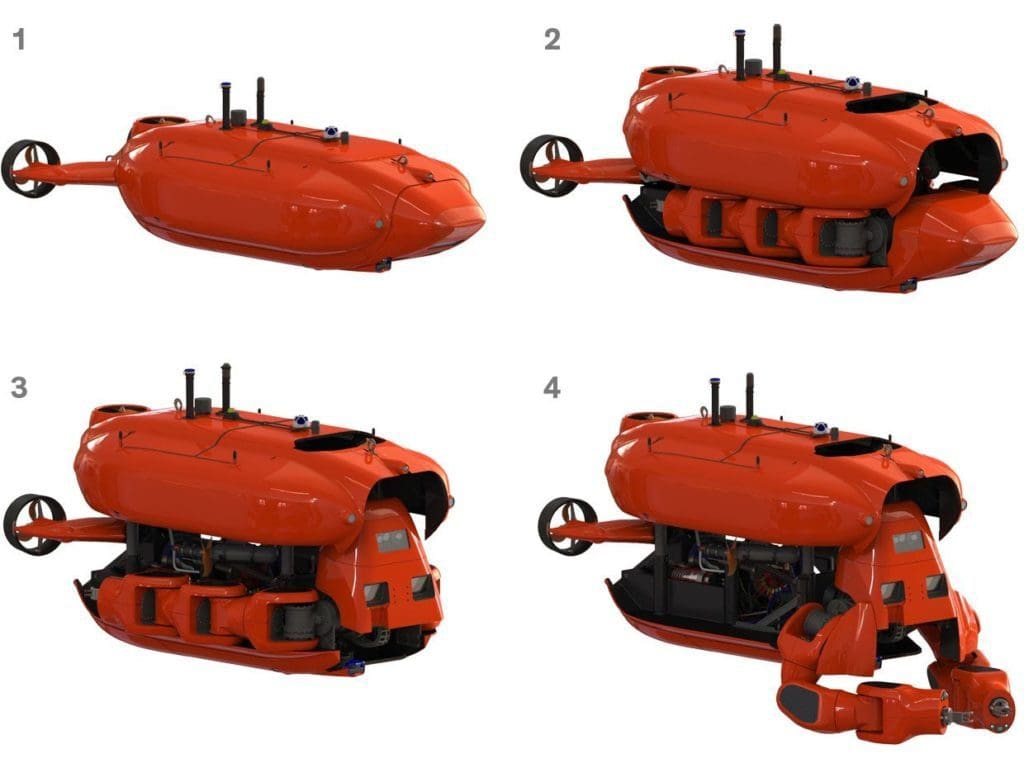
1 – Aquanaut viaggia nella sua normale configurazione di sottomarino per perlustrare e attraversare aree subacquee. Può farlo a lungo, con un’autonomia di oltre 200 chilometri.
2 – Una volta a destinazione, il robot si trasforma
3 – Nel giro di appena 30 secondi tira fuori la testa…
4 – … e le braccia per diventare operativo.
La metamorfosi è frutto del lavoro di quattro attuatori lineari (e diversi motori impermeabili) alimentati da una batteria al litio non dissimile da quelle che equipaggiano le attuali auto elettriche.
Il suo “cervello” incorpora telecamere stereo, sensori 3D ed un sonar.
Potrei anche non dirvelo, ma scommetto indovinereste facilmente che alle estremità delle sue braccia sono posizionate robuste “chele” provviste anch’esse di sensori.
Dalla sua nascita nel 2014, HMI ha ottenuto più di 20 milioni di euro in finanziamenti. Cinque anni dopo, ecco il prototipo reale del robot transformer subacqueo prendere vita e iniziare test in ambienti controllati.