

Sott’acqua c’è un mondo molto più grande di quello che vediamo sulla terraferma. Un mondo pieno di risorse e di scenari, che non conosciamo quasi per nulla. Da tempo stiamo esplorando i fondali marini con diversi progetti, ma la grossa difficoltà è quella di automatizzare la mappatura: e gli ambienti subacquei sono particolarmente difficili per i robot autonomi.
Non si tratta di strade, gli oggetti sono in continuo movimento e cambiamento e i robot devono capire dove si trovano senza dipendere dalle informazioni GPS. Un’impresa.
L’Ai per conoscere i fondali marini
Un team di ricercatori dello Stevens Institute of Technology ha sviluppato un robot in grado di navigare sott’acqua anche in un porto turistico affollato. In tempo reale, il robot è in grado di mappare il suo ambiente e i fondali, tracciare la posizione e progettare un passaggio sicuro attraverso un ambiente intricato.
“La mappatura subacquea in un ambiente pieno di ostacoli è un problema molto difficile, perché non hai la stessa consapevolezza situazionale di un robot volante o terrestre, e questo rende l’invio di un robot sott’acqua un processo intrinsecamente rischioso”, dice Brendan Englot, capo progetto e direttore ad interim dello Stevens Institute for Artificial Intelligence.
L’intelligenza artificiale ha trasformato il sistema: l’algoritmo creato permette al robot di tracciare e gestire il livello di incertezza sulla sua posizione e sull’ambiente circostante. Con questa nuova “consapevolezza”, il robot prende decisioni in tempo reale anche in circostanze impreviste. Per usare le parole dello stesso Englot, il robot “sa ciò che non sa”.
Le Possibili applicazioni
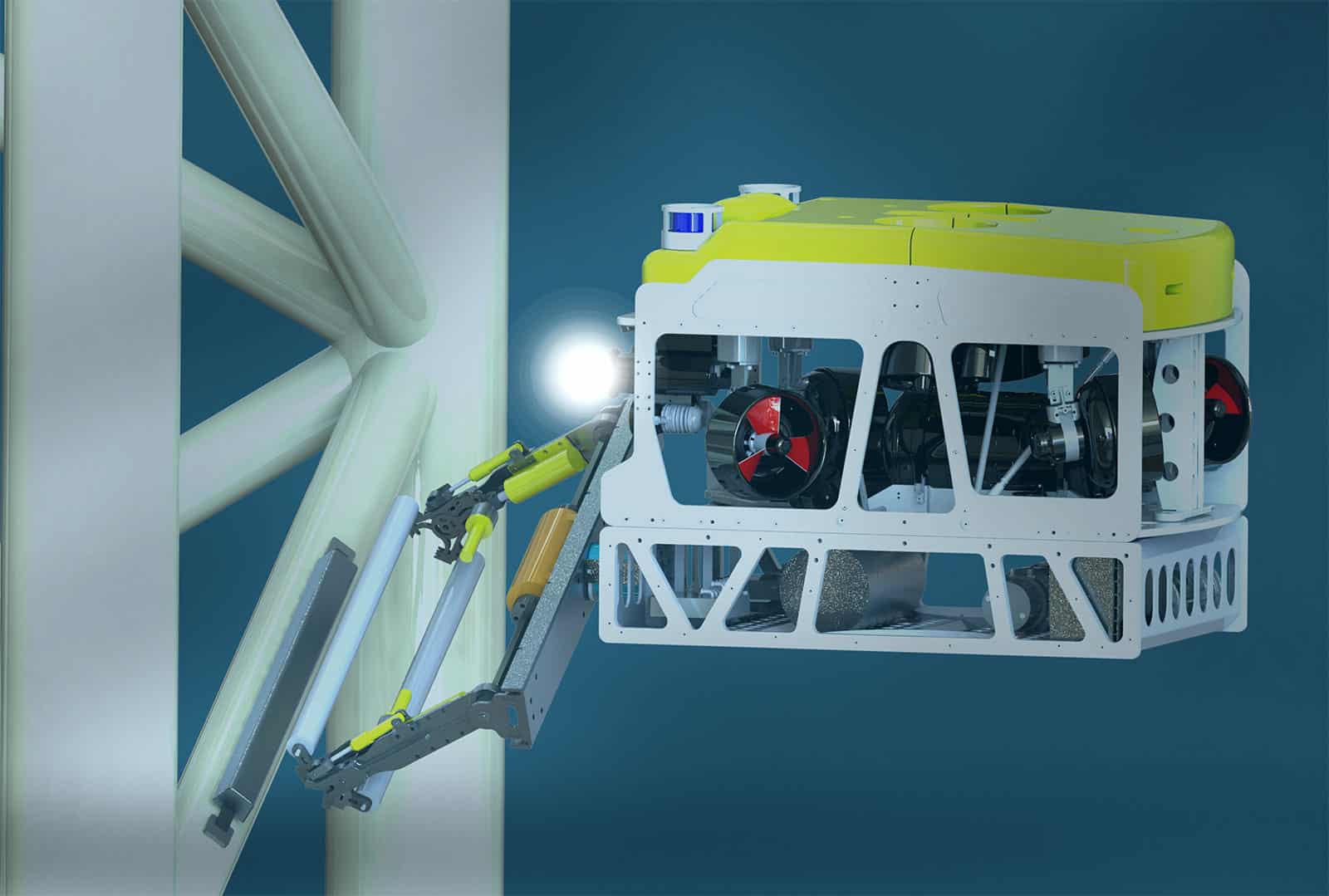
Il robot ha molte potenziali applicazioni, comprese le riparazioni portuali, la costruzione e la manutenzione di parchi eolici offshore, progetti di acquacoltura e impianti di perforazione. Andando avanti, il team di Englot prevede di rafforzare la piattaforma robotica per consentire missioni sottomarine di maggiore durata.
Il prossimo passo, però, prima di mappare il fondo, è raggiungerlo. Il robot, un BlueROV2 personalizzato, per adesso opera a una profondità di 1 metro e utilizza segnali sonar per rilevare gli oggetti intorno ad esso. Il suo primo “lavoro” è stato quello di mappare (con successo) il porto presso la US Merchant Marine Academy a King’s Point, New York.
Siamo agli albori di un impegno che finirà per rendere i fondali marini conosciuti e percorribili con la tranquillità e la certezza delle nostre attuali strade. Certo, un giorno le percorreremo in lungo e in largo, ma nel frattempo lo faranno per noi i robot autonomi.


