
Suzuki MOQBA, il Quad Bike che sale per le scale
Suzuki MOQBA promette di rivoluzionare la mobilità urbana: un quad bike versatile per superare scale e ostacoli, particolarmente utile in situazioni di emergenza.

Suzuki MOQBA promette di rivoluzionare la mobilità urbana: un quad bike versatile per superare scale e ostacoli, particolarmente utile in situazioni di emergenza.

I robot sanno correre? Il nuovo Mini Cheetah ha imparato a correre grazie al metodo di apprendimento testato dagli scienziati del MIT.

Un quadrupede robot che coniuga agilità e stabilità. E si, ha una specie di testa di capra, ma lasciamo perdere questo dettaglio, please.

ANYmal, il robot quadrupede dell'ETH di Zurigo, ora ha le ruote e si alza in piedi. Potreste trovarvelo a casa per delle consegne.

Prima o poi sarebbe successo, lo sapevamo. Un robot quadrupede è stato equipaggiato con un fucile da cecchino. Una macchina assassina.
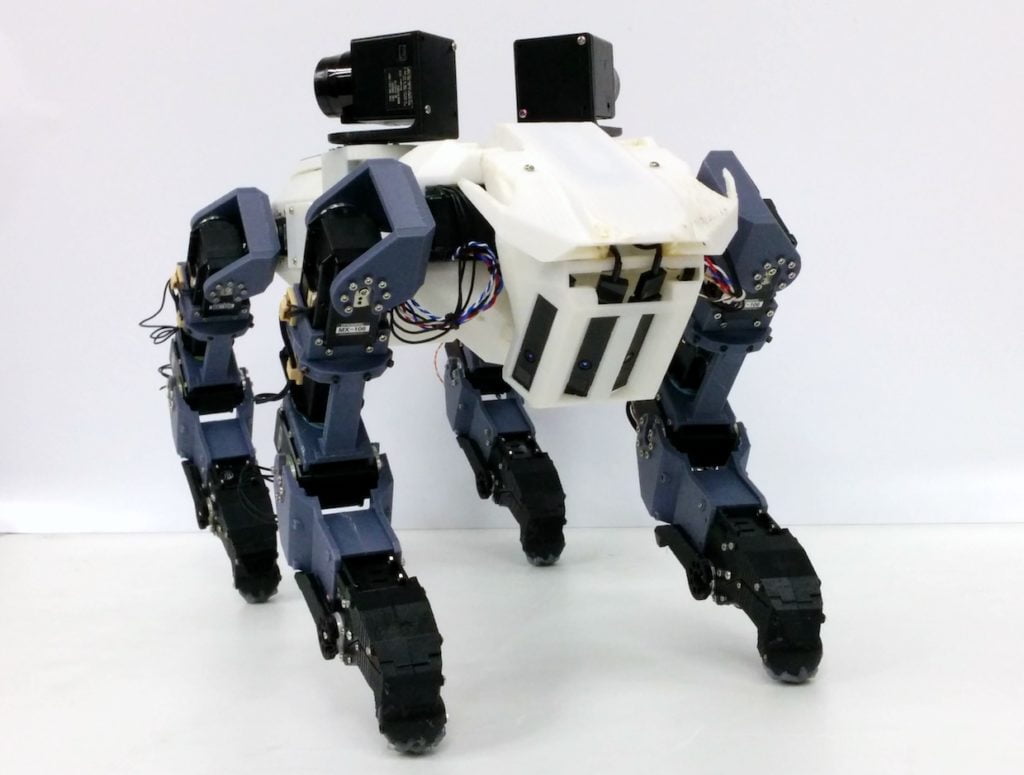
L'applicazione di reti neurali e "pollici" opponibili permette ai robot quadrupedi di superare gli omologhi biologici e salire anche su scale verticali

Alberto Robiati e Gianluca Riccio guidano i lettori attraverso scenari del futuro: le opportunità, i rischi e le possibilità che abbiamo di realizzare il domani possibile.
News sul mondo di domani.
Diamo notizie sul futuro di tecnologia, scienza e società: se c'è una cosa che sta per arrivare, qui è già arrivata.
Categorie
Edizioni in lingua
fffdddddd
© 2024 Futuroprossimo -  Quest'opera è distribuita con Licenza Creative Commons Attribuzione 4.0 Internazionale.
Quest'opera è distribuita con Licenza Creative Commons Attribuzione 4.0 Internazionale.